Selected Publications
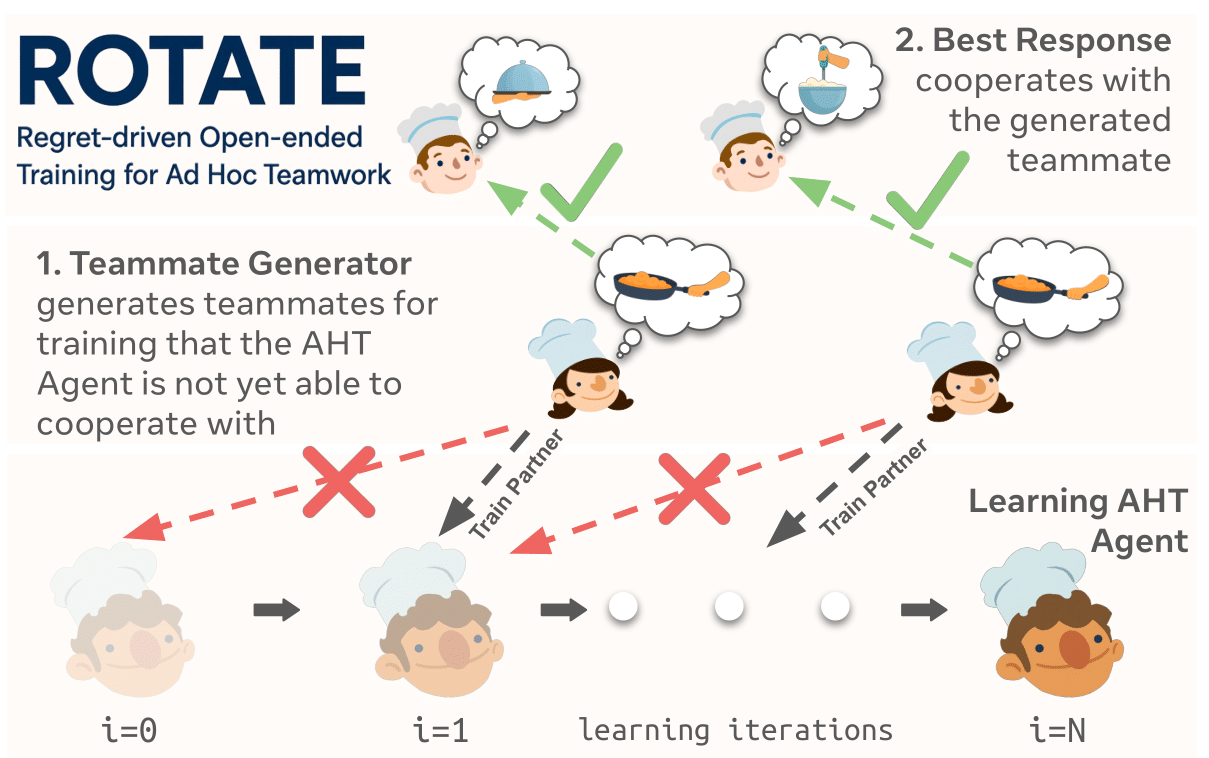
ROTATE: regret-driven open-ended training for ad hoc teamwork
Under Review
A new perspective on ad hoc teamwork as an open-ended learning problem aimed at producing robust and generalizable agents.
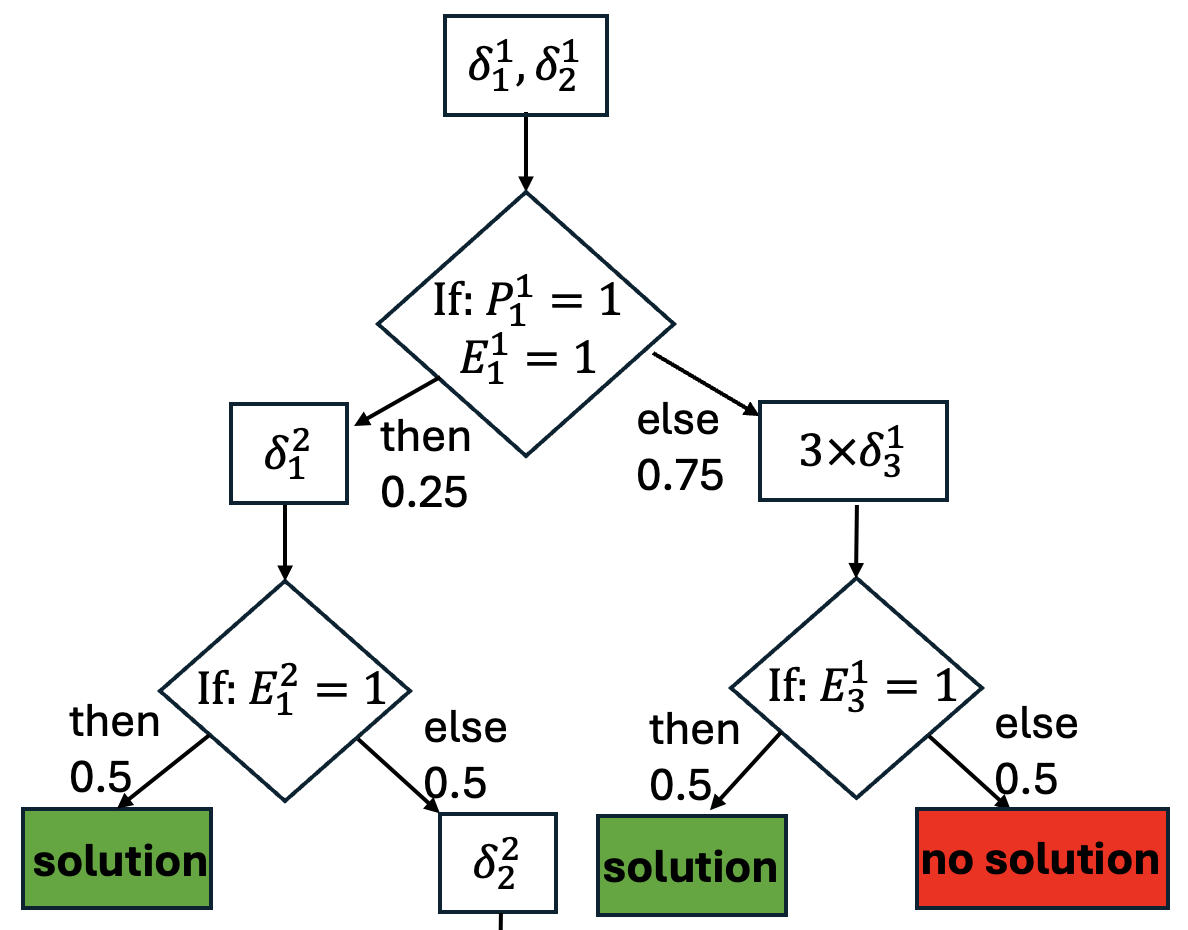
Effort allocation for deadline-aware task and motion planning: a metareasoning approach
Under Review
A new class of TAMP problems is introduced by considering deadline constraints, where we prove its hardness and design efficient policy heuristics.
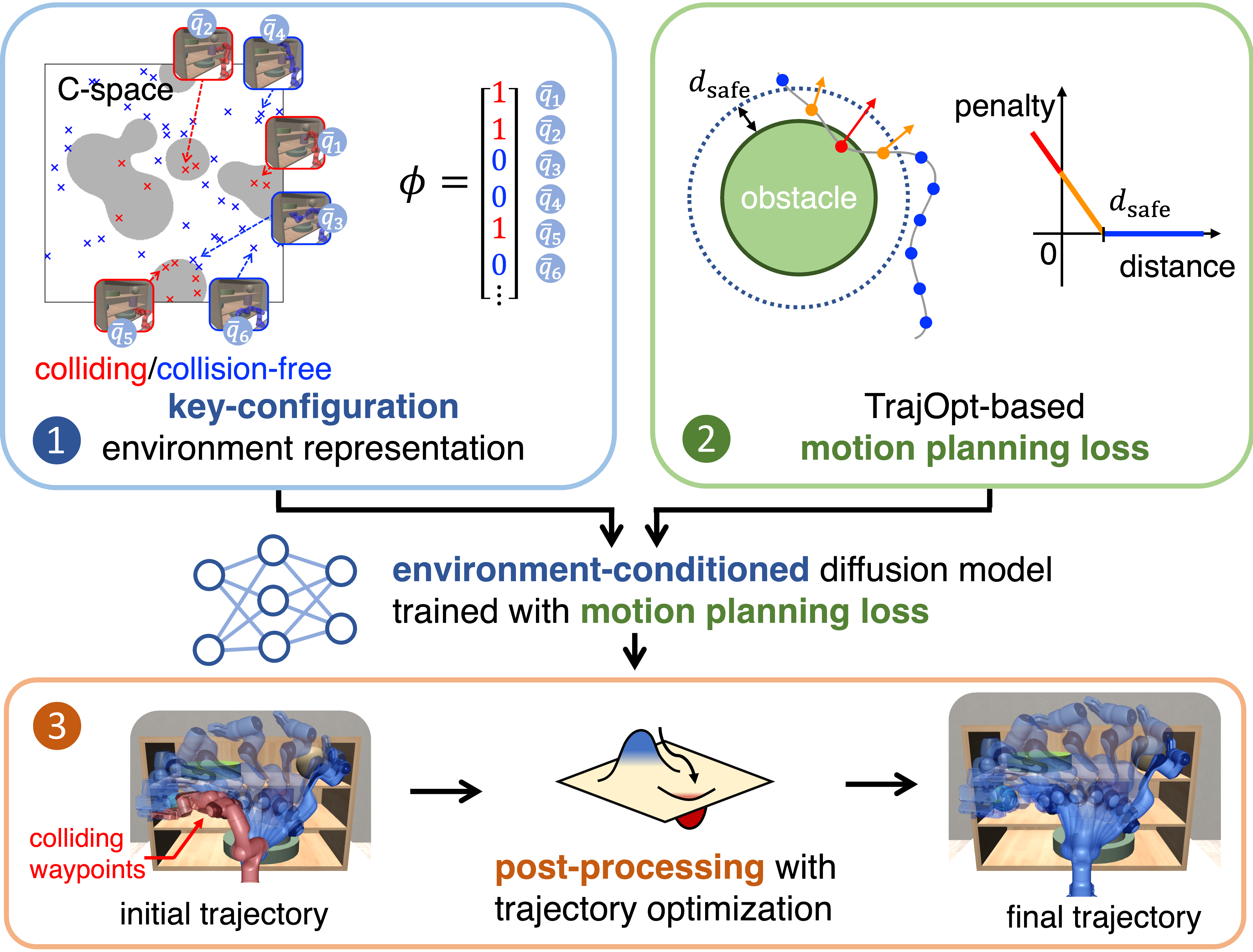
PRESTO: fast motion planning using diffusion models based on key-configuration environment representation
IEEE International Conference on Robotics and Automation (ICRA 2025)
This work addresses the question of what constitutes the ideal representation for solving motion planning problems as sampling from a diffusion model.

Asynchronous task plan refinement for multi-robot task and motion planning
IEEE International Conference on Robotics and Automation (ICRA 2024)
A new multi-robot task and motion planning formulation that eliminates the need for pre-discretization of the space and synchronous actions among robots.
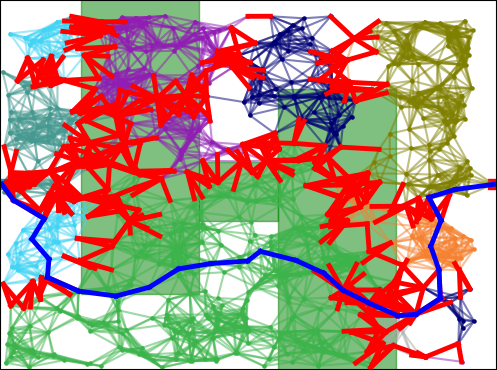
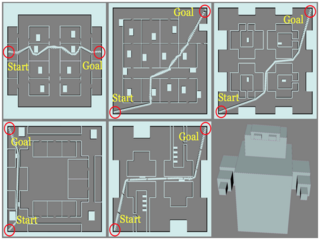
Motion planning (in)feasibility detection using a prior roadmap via path and cut search
Robotics: Science and Systems (RSS 2023)
Iterative pathfinding and cut finding effectively reduce the search space, making the determination of whether a prior roadmap contains a feasible solution more efficient.
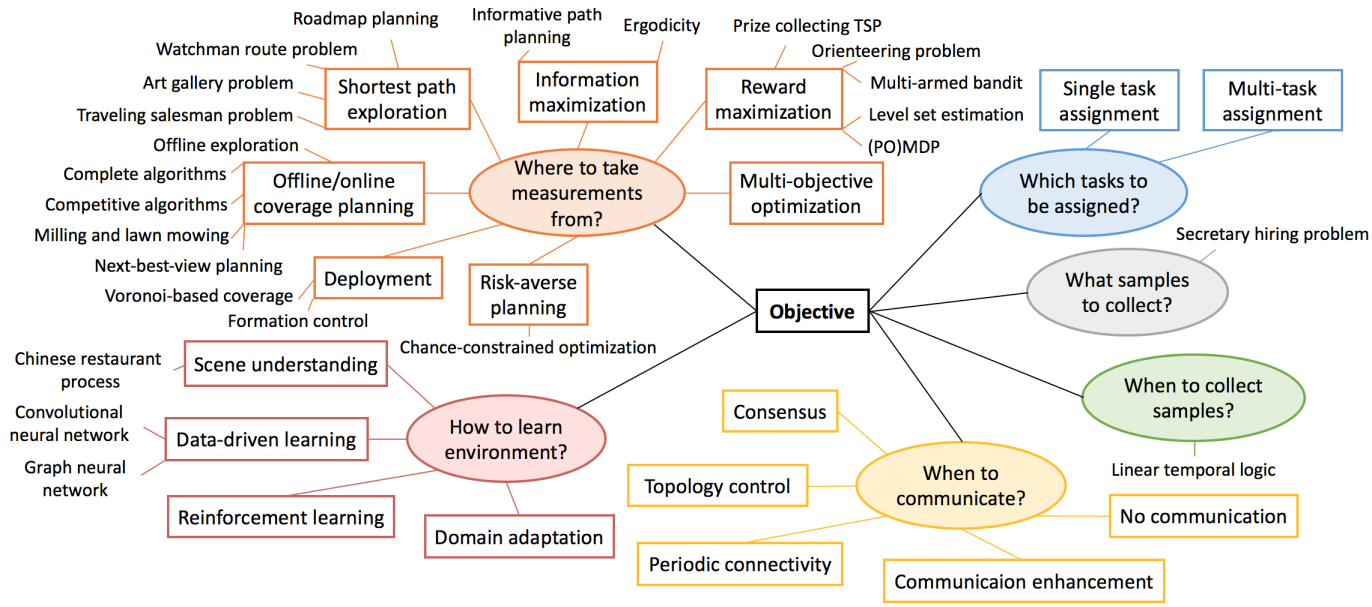
A survey of decision-theoretic approaches for robotic environmental monitoring
Foundations and Trends in Robotics 2023
A comprehensive survey on robotic environmental monitoring, covering environmental representations and properties, tasks, and decision-theoretic tools.

Learning when to quit: meta-reasoning for motion planning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021) Finalist for Best Cognitive Robotics Paper Award
Being able to trade-off between plan quality and computation time lets you build a more efficient planner.
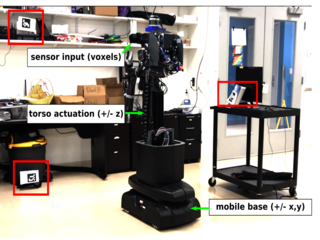
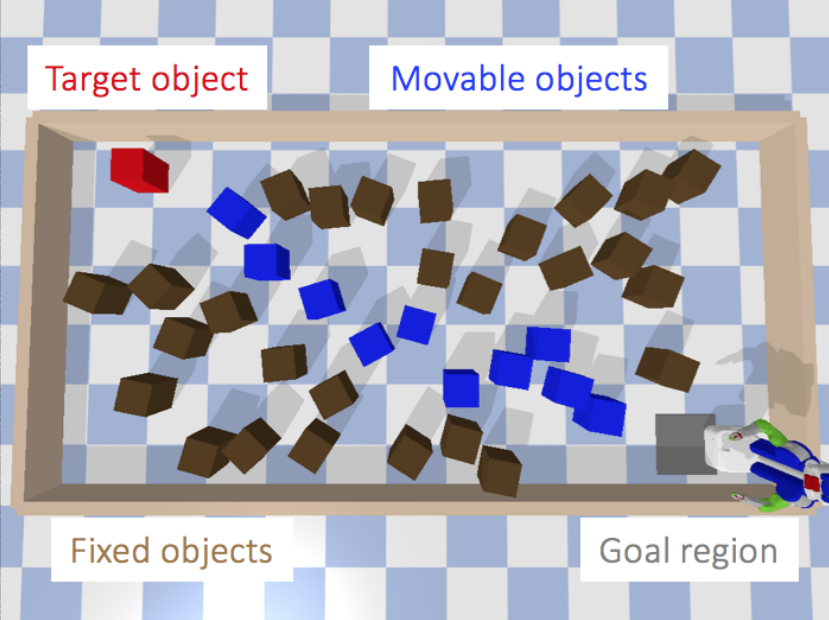
Multi-resolution POMDP planning for multi-object search in 3D
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021) Winner of Best Robocup Paper Award
The challenge of intractable partially observable 3D object search can be alleviated through a multi-resolution belief space representation.
Reactive task and motion planning under temporal logic specifications
IEEE International Conference on Robotics and Automation (ICRA 2021)
When robots work with humans, linear temporal logic allows the modeling of human interventions, while a behavior tree enables the robot to execute reactively.

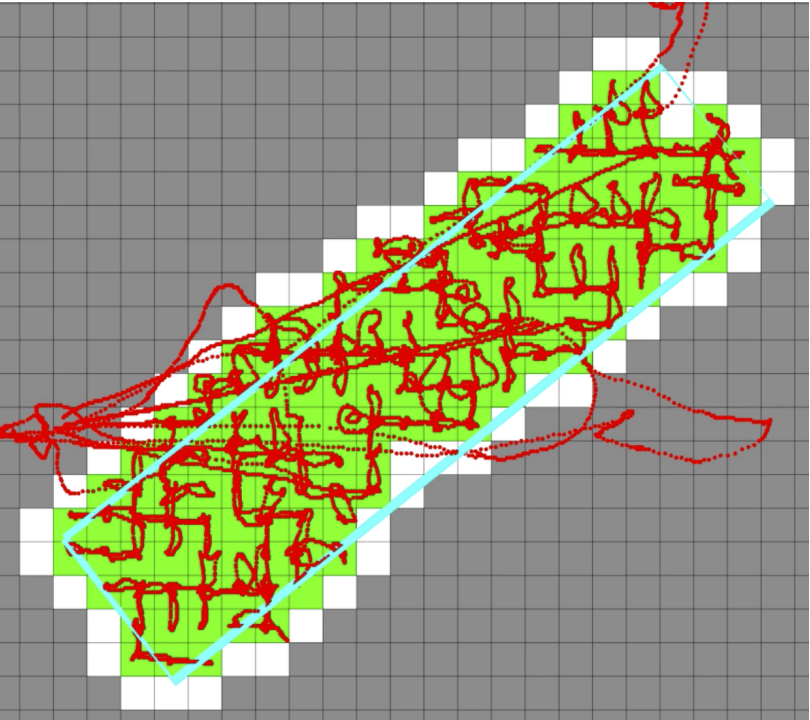
Environmental hotspot identification in limited time with a UAV equipped with a downward-facing camera
IEEE International Conference on Robotics and Automation (ICRA 2021)
Unlike standard multi-armed bandit settings, the arms' rewards are correlated, and the reward amount depends on the altitude of a UAV.
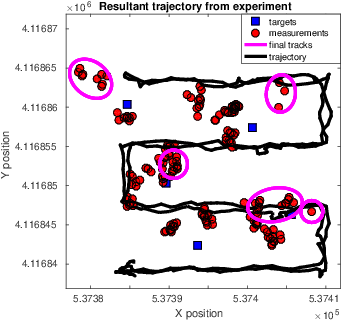
GM-PHD filter for searching and tracking an unknown number of targets with a mobile sensor with limited FOV
IEEE Transactions on Automation Science and Engineering (T-ASE 2021)
IEEE International Conference on Robotics and Automation (ICRA 2017)
The explicit boundary of limited sensing range is incorporated into the GM-PHD filter, which estimates both the number and spatial density of targets.

Game tree search for minimizing detectability and maximizing visibility
Autonomous Robots (AURO 2021)
IEEE International Conference on Robotics and Automation (ICRA 2019)
Minimax search tree and Monte-Carlo search tree methods for discrete, sequential, two-player, zero-sum games that involve trading off conflicting objectives.
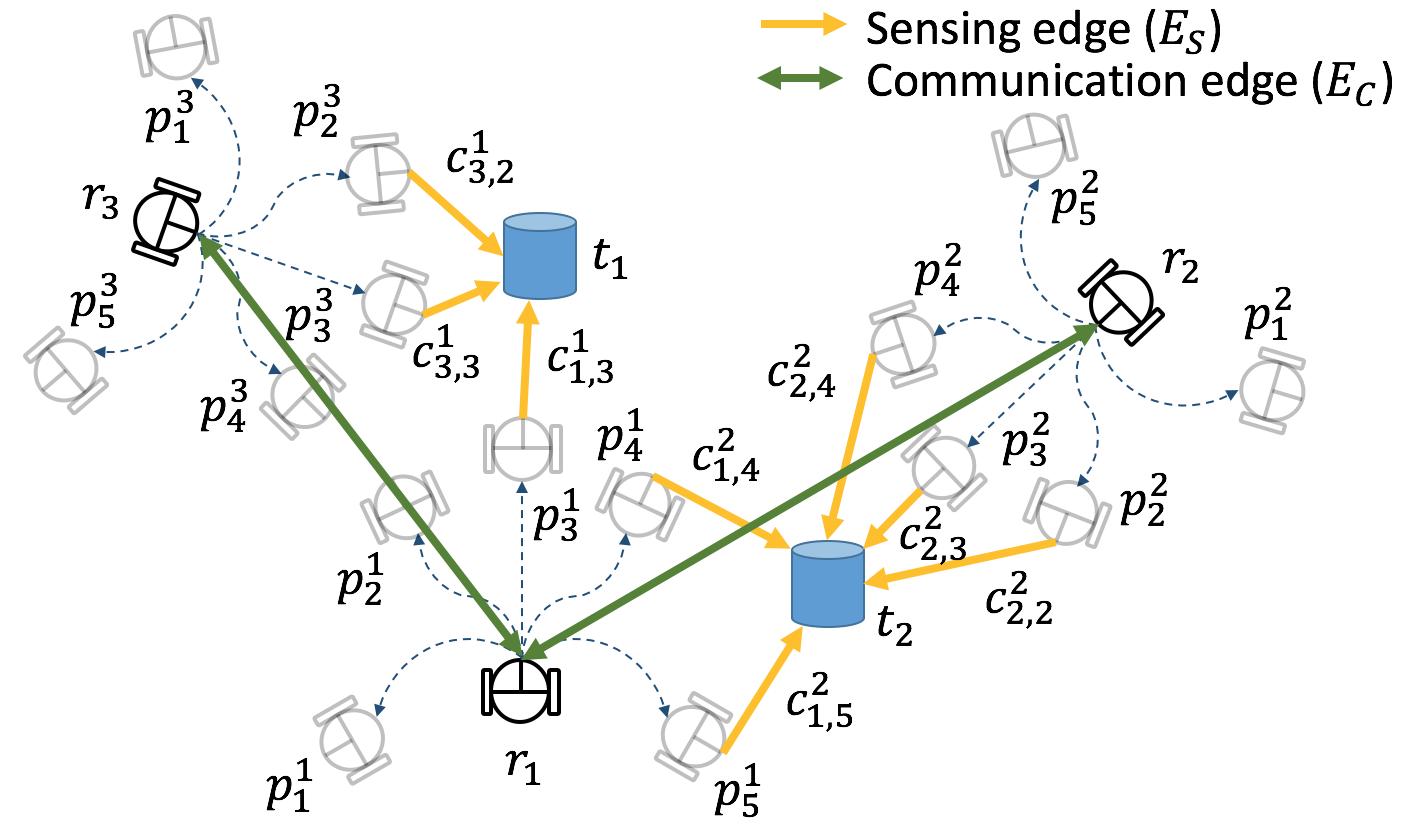
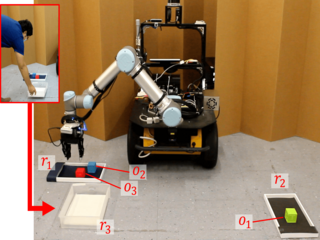
Distributed assignment with limited communication for multi-robot multi-target tracking
Autonomous Robots (AURO 2020)
IEEE International Conference on Robotics and Automation (ICRA 2018)
The reduction of multi-robot multi-target tracking problems to mixed packing and covering problems enables the use of local algorithms for distributed problem-solving.
A competitive algorithm for online multi-robot exploration of a translating plume
IEEE International Conference on Robotics and Automation (ICRA 2019)
A recursive depth-first-search algorithm for exploring the unknown shape of a moving plume, with provable competitive ratio guarantees.
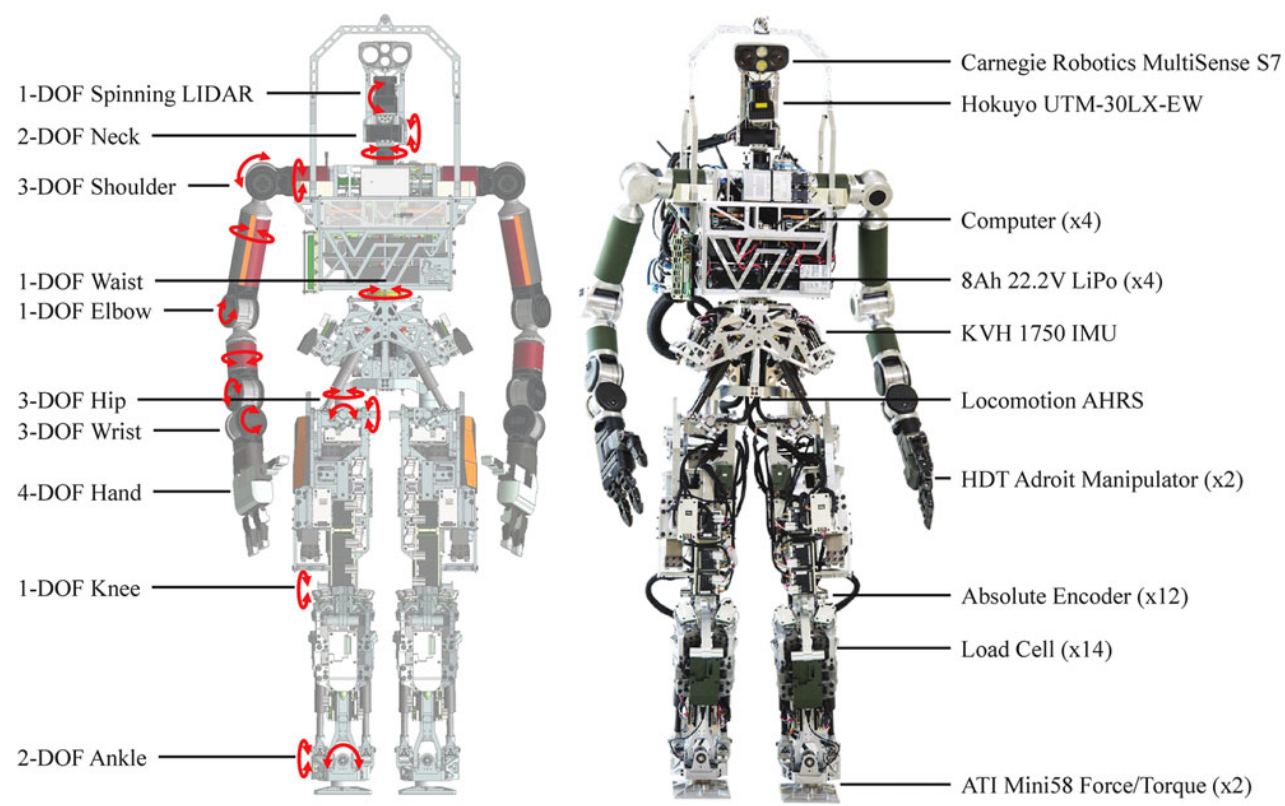
Team VALOR’s ESCHER: A novel electromechanical biped for the DARPA Robotics Challenge
Journal of Field Robotics (JFR 2017)
Virginia Tech's electric series compliant humanoid participated in the finals of the DARPA Robotics Challenge.
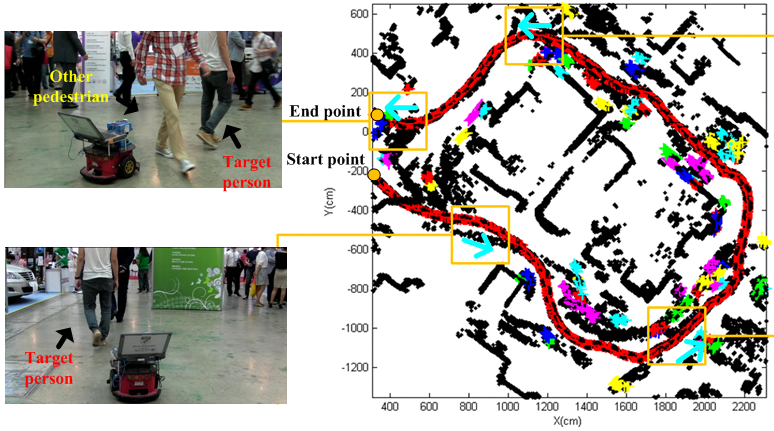
Hierarchical sample-based joint probabilistic data association filter for following human legs using a mobile robot in a cluttered environment
IEEE Transactions on Human-Machine Systems (T-HMS 2016)
Correlations among targets are explicitly modeled for target tracking, a consideration that is generally treated independently in the tracking literature.